ローンチ・ヴィークル
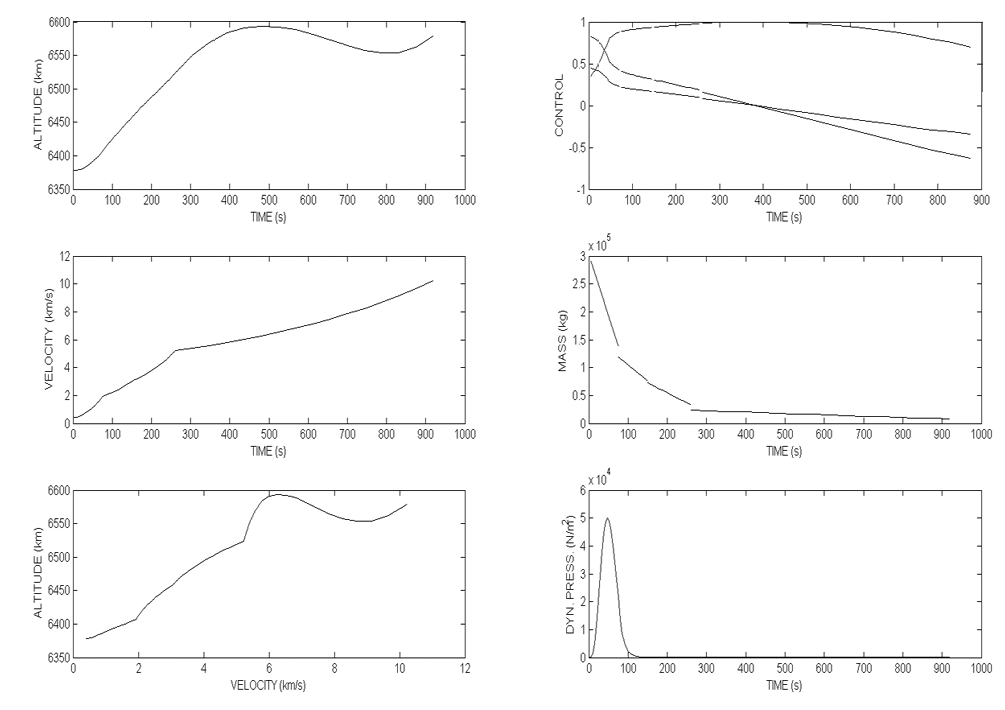
下記の参考文献[1](第3章)で、MIDACOは多段階ローンチ・ヴィークル(打ち上げ機または打ち上げロケットともいう)の上昇を最適化するために使用されました。この打ち上げ機のモデルはデルタIII宇宙ロケット(ボーイング)に基づいており、連続変数と離散変数(ブースターの数など)の最適化変数が共に含まれます。その結果として得られたMINLPは、128の決定変数(うち3つは離散変数)と127の制約条件(うち5つは等式制約)から構成されます。この事例はバーミンガム大学(Rueckmann J, Schlueter M.)、ミュンヘン連邦軍大学(Gerdts M.)および欧州宇宙機関(Erb S.)との協力により実施されました。
| ロケット打ち上げ準備 | ボーイングロケットファミリー |
 |  |
{kind=link}
参考文献
| [1] | MIDACO on MINLP Space Applications | JASR (Elsevier) Vol 51(7), 1116–1131 (2013) | Preprint |
| 『Defense & Aerospace Week』誌掲載のレビュー論文は こちら | |||
| JASR journalによる論文へのレフェリーコメントは こちら | |||